Choosing the right gear ratio for a DC motor is crucial for optimal performance. According to David M. Smith, a leading expert in motor applications, "Selecting the correct gear ratio can enhance efficiency and torque." Understanding how to choose the right gear ratio for a DC motor can significantly impact your project’s success.
Gear ratios determine how speed and torque balance out in a motor system. A motor running at high speed may need a lower gear ratio for higher torque. Conversely, a low-speed motor may benefit from a higher ratio. Yet, many overlook the importance of fine-tuning these attributes. It's not just about matching numbers; it's about grasping the unique demands of your application.
Getting this right often requires practical experimentation and adjustment. Factors like load, desired speed, and efficiency should be evaluated continuously. Gear ratio calculation seems straightforward, but real-world conditions can complicate matters. Consider what works in theory may not perform the same in practice. Reflection on these elements is essential for effective gear ratio selection.
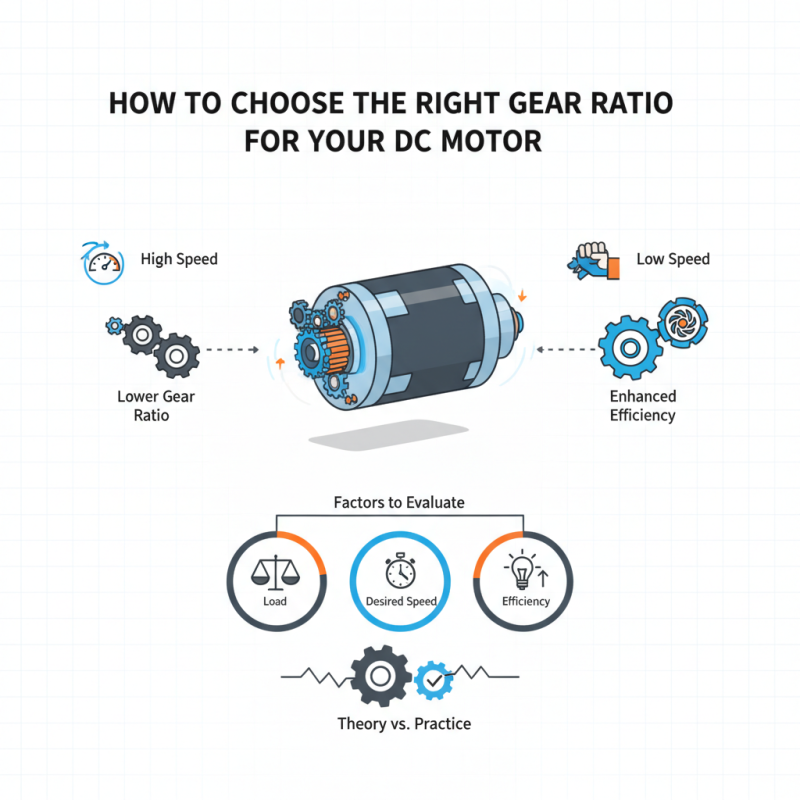
Understanding gear ratios is crucial for optimizing the performance of DC motors. A gear ratio is the relationship between the input speed and the output speed of a motor. This ratio helps determine the torque and speed characteristics for your application. Lower gear ratios provide higher speed but reduced torque, while higher ratios increase torque at the expense of speed.
When choosing a gear ratio, consider your project's specific needs. For instance, robotic applications often require a balance between speed and torque. If a robot needs to lift heavy objects, a higher gear ratio is essential for sufficient torque. On the other hand, a model car might prioritize speed, necessitating a lower gear ratio.
Adjusting gear ratios can greatly impact efficiency. However, the perfect ratio is not always clear. Sometimes, it requires multiple tests and adjustments to find the ideal balance. It’s essential to reflect on the performance outcomes. Will the motor heat up too much? Does the gear system create noise? Keep track of these details for better decisions in future projects. Understanding these nuances can help perfect your design process.
: A gear ratio is the relationship between the input speed and the output speed of a motor.
The right gear ratio optimizes torque and speed for specific applications, enhancing overall motor performance.
Lower gear ratios provide higher speeds but reduce torque output, which may not suit all applications.
Project needs, load conditions, and the balance between speed and torque are essential when selecting a gear ratio.
Ignoring load conditions and the balance between speed and torque can lead to performance issues or motor burnout.
Testing allows you to find the ideal balance for your needs, optimizing your design for best performance.
Reflecting helps identify issues, like overheating or noise, guiding future design decisions and adjustments.
A higher gear ratio is beneficial for applications requiring increased torque, like lifting heavy objects in robotic systems.
Simulations can save time and resources by allowing exploration of various gear ratios before physical implementation.
Regular evaluation is vital as project requirements may change, impacting the effectiveness of the current gear ratio.
Choosing the right gear ratio for a DC motor is crucial for optimizing performance in various applications. The article begins by explaining the concept of gear ratios and how they affect a motor's speed and torque. It highlights the factors influencing gear ratio selection, such as load requirements, desired speed, and efficiency. Understanding these dynamics is essential for effectively calculating the ideal gear ratio tailored to specific operational needs.
Moreover, the article addresses common mistakes to avoid when selecting gear ratios, which can lead to inefficiencies or mechanical failures. Practical applications demonstrate how different gear ratios can impact functionality in real-world scenarios. Overall, the article serves as a comprehensive guide on how to choose the right gear ratio for DC motors, ensuring that users can make informed decisions for their projects.
